|
 |
|
✉️ I'm expected to graduate in 2026 and open to both academia and industry positions. If you're interested, please feel free to contact me. 📌 I am seeking self-motivated undergraduate and graduate students for academic collaboration, for future research at the intersection of VLA, LLMs, and world models. |
|
|
 |
We propose a formal method and LLM framework for coordinating large fleets of heterogeneous robots in open and dynamic environments. Our approach integrates model-checking-based task planning with LLM-powered reasoning and interaction, ensuring adaptability, explainability, and optimal mission execution. Validated through simulations and real-world deployments, it proves effective for disaster response, infrastructure inspection, and dynamic surveillance. |
 |
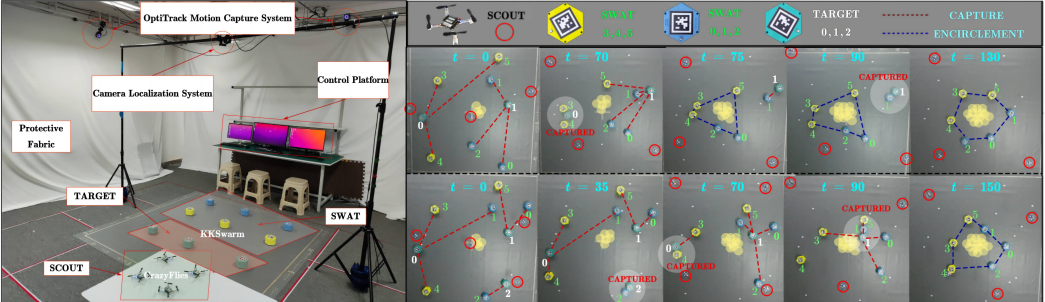
We propose H-MCTS Ambush, a parameterized ambush strategy optimized with Hybrid Monte Carlo Tree Search for collaborative capture of dynamic targets. Our method accounts for topology, visibility, speed ratios, and capture ranges, while leveraging learned heuristics to accelerate planning without sacrificing quality, successfully capturing faster and even human-controlled evaders in complex environments. |
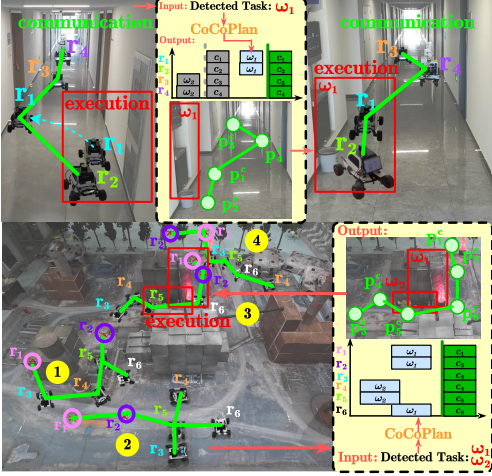 |
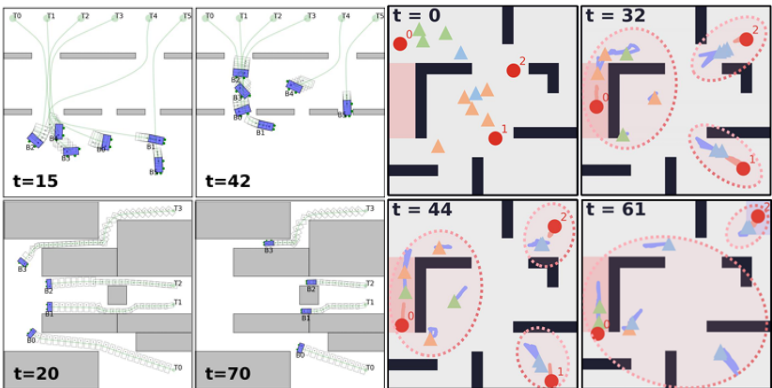
We propose CoCoPlan, a unified framework that co-optimizes collaborative task planning and intermittent communication for multi-robot systems. Our approach integrates the branch-and-bound task encoding, adaptive efficiency objectives, and optimized event scheduling to handle dynamic environments under limited connectivity in both office and disaster-response scenarios. |
 |
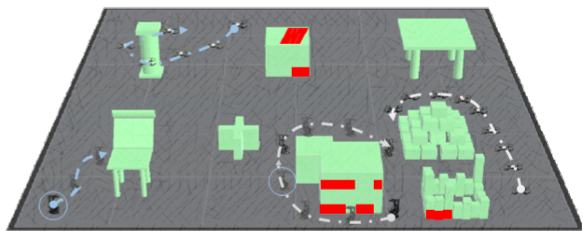
We propose SLEI3D, a planning and coordination framework for heterogeneous multi-robot systems to perform simultaneous 3D exploration, inspection, and real-time reporting in unknown environments. Our approach integrates adaptive inspection and intermittent communication protocols with a multi-layer, multi-rate planning mechanism for robust coordination. |
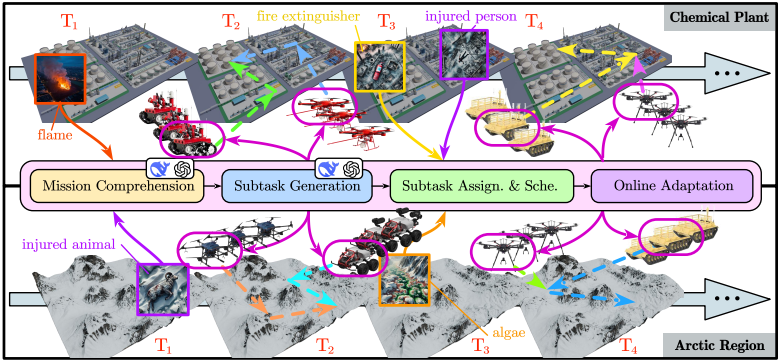 |
We propose DEXTER-LLM, a novel framework for dynamic task planning in unknown environments. Our approach integrates LLM-based multi-stage reasoning, optimization-based task assignment, and adaptive human-in-the-loop verification to tackle the challenges of online adaptability and explainability. |
 |
We propose Meta-Scan, a meta-learning approach for efficient sensor scanning in 3D and uncertain environments using heterogeneous multi-robot systems. Our method enhances exploration and rapid adaptation in the complex scenarios. |
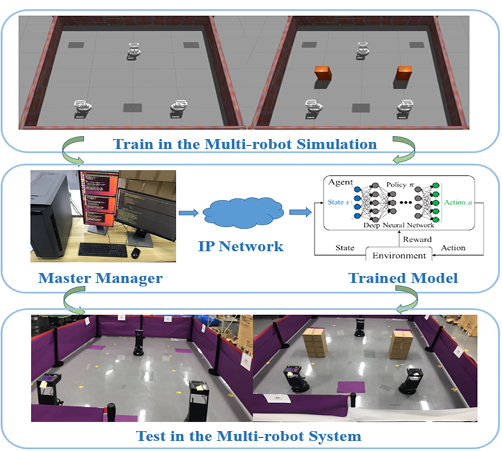 |
We propose MultiRoboLearn, an open-source framework that bridges multi-agent deep reinforcement learning with real-world multi-robot applications. Our framework offers standardized, easy-to-use simulation scenarios seamlessly transferable to physical multi-robot systems, and provides a benchmark for varying algorithm comparisons. |
 |
We propose K-Serial Coalition, a distributed strategy for adaptive coalition formation in large-scale heterogeneous multi-robot systems. Our approach combines a K-serial stable coalition algorithm with a heterogeneous graph attention network heuristic to enhance online adaptability while guaranteeing solution quality. |
 |
We propose CHO-Framework, a combinatorial-hybrid optimization approach for multi-agent coordination. Our method jointly addresses coalition formation and collaborative control by interleaving discrete task assignment with continuous behavior optimization to guarantee the feasibility and quality. |
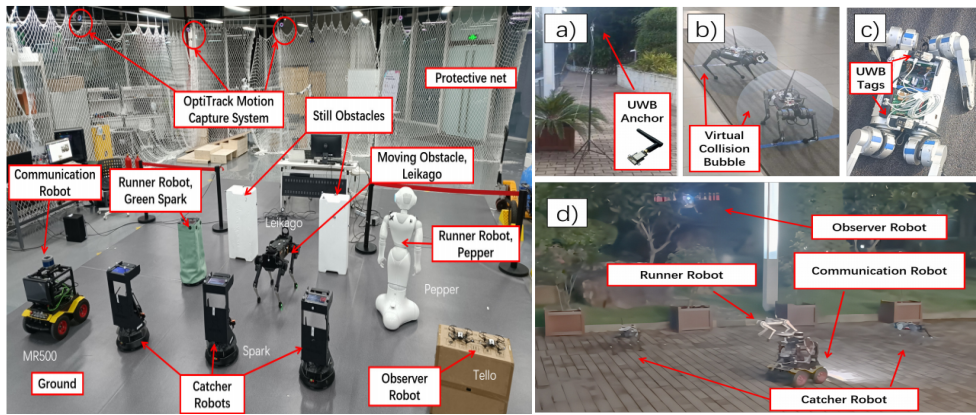 |
We propose ASP-CL Framework, an actor-critic multi-agent reinforcement learning approach that integrates asymmetric self-play and curriculum learning for heterogeneous multi-robot systems. Our method enables cooperative behaviors in adversarial catching tasks under real-world constraints. |
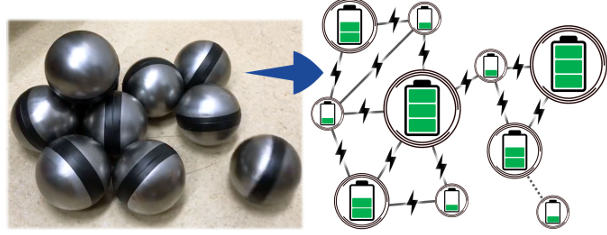 |
We propose FreeBOT-Energy, an energy sharing mechanism for modular self-reconfigurable robots that enables modules to exchange power through surface contact. Our approach designs robust sharing rules and network structures to ensure sustainability and maximize participating modules. |
 |
We propose AV-SLAM, an audio-visual fusion approach that integrates sound source direction with RGB-D sensing to handle dynamic obstacles in multi-robot SLAM. Our method replaces costly object detectors with lightweight DoA-based cues, enabling efficient on-board processing and achieving stable localization across diverse dynamic environments. |
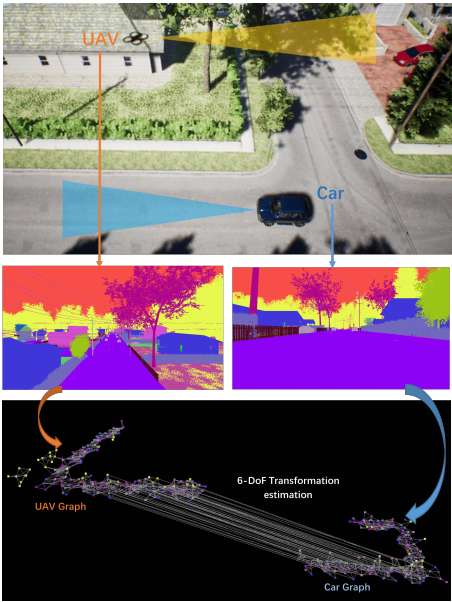 |
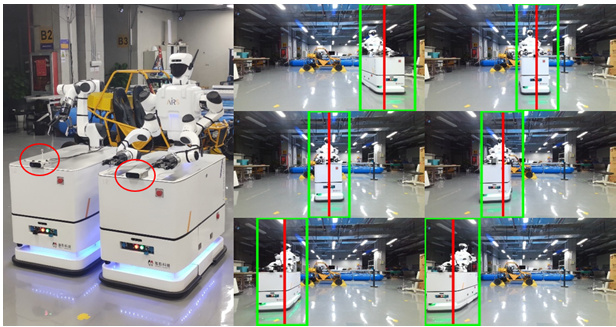
We propose SH-Graph, a semantic histogram-based graph matching method for efficient and robust multi-robot global localization. Our approach overcomes large viewpoint variations while enabling real-time performance in both homogeneous and heterogeneous robot systems. |
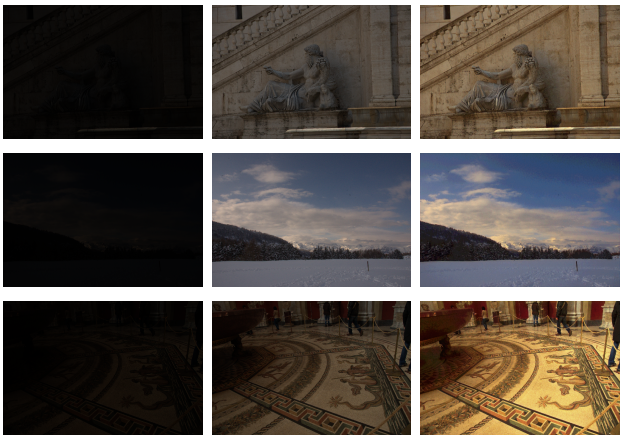 |
We propose ULIE-Net, a two-stage unsupervised framework for low-light image enhancement. Our method combines Retinex-based pre-enhancement with an adversarially trained refinement network, overcoming the need for paired data, poor dark-scene performance, and noise amplification. |
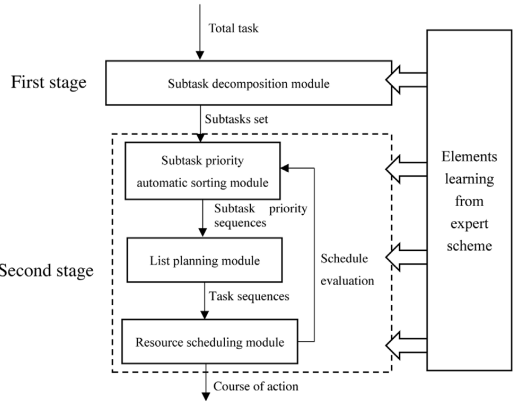 |
We propose NSG-Planner, a mission planning method for UAV courses of action based on a two-segment nested scheme generation strategy. Our approach integrates task decomposition and resource scheduling to automatically produce diverse operational schemes with superior task completion time to verify its effectiveness and flexibility. |
|
[08/2024], Postgraduate Studentship. [09/2018], First-class Graduate studentship. [09/2017], First-class Graduate studentship. [11/2015], National Scholarship - Ministry of Education, PRC. [11/2014], National Scholarship - Ministry of Education, PRC. |
|
Reviewer: T-RO, RA-L, T-ASE, JFR, IET Cyber-Systems and Robotics, ICRA, IROS Teaching Assistant: |
|
Skills: Python, C++, Matlab, C#, ROS, Machine Learning (ML), RL, Graph Learning, Git & GitHub, Robotics Simulator (Gazebo, Isaac Gym, Unity, V-rep, Mujoco, PyBullet), CATIA, AutoCAD, Robotic Platforms (Tello, Crazyflies, Quadrotor, TurtleBot, KKSwarms, Scout, AgileX, Go2), Heterogeneous Multi-Robot Systems. |
|
| |||
|
A glimpse of our recent experimental activities and achievements |
|||
Epic Moment: Large-scale Robot Catching in Action
Dozens of robots working in perfect harmony—this is the pinnacle of collective intelligence, captured in a single breathtaking moment.
|

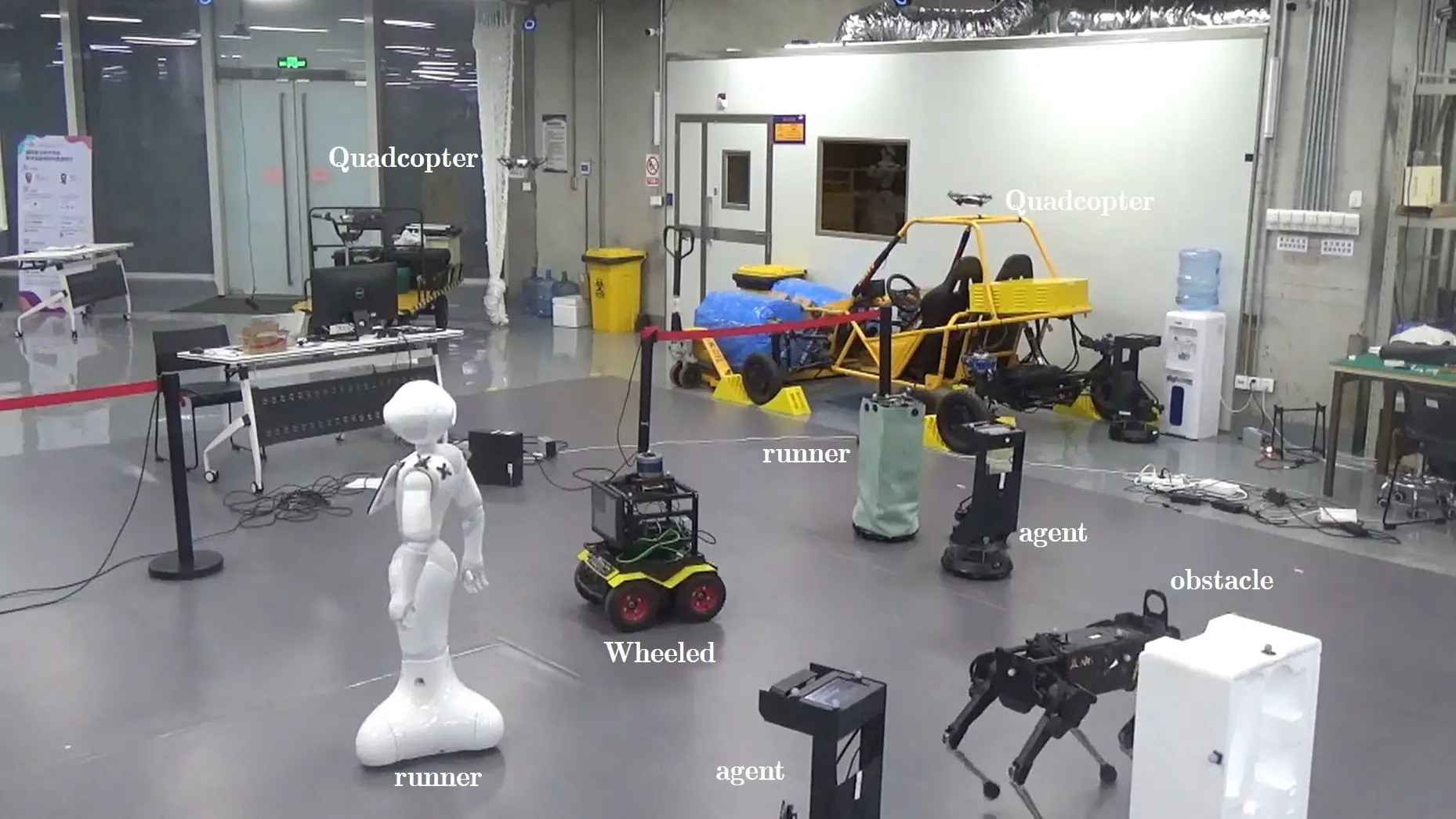
Heterogeneous Robots: Each Shines in Their Own Way
Multiple types of robots, each with unique capabilities, collaborate seamlessly to showcase the beauty of diverse intelligent teamwork.
|
||

LLM Team: The Ultimate Group Photo
Our team, united by passion and innovation—this photo captures the spirit of AI and human synergy at its finest.
|

CocoPlan: Behind the Scenes of the Release
Witness the creative spark and teamwork that power our cutting-edge algorithms—every breakthrough has a story.
|
||

SLEI3D: The Art of 3D Robot Collaboration
Robots collaborating in 3D space—where technology meets aesthetics, and innovation becomes art.
|
Ambush: A Multi-Agent System Showcase
Intelligent Game System: Multi-agent strategic competition and cooperation in complex environments.
|
||

Competition Highlight: The Ultimate Showdown
Intense competition, rapid strategies, and the thrill of the challenge—this is where intelligent agents push their limits.
|

Hybrid Control Course Competition Highlight
A memorable group photo from the graduate-level Hybrid Control course competition—showcasing the excitement, teamwork, and achievements of all participants.
|
||
|
|
Last update: 2025.09.14. Thanks. |